

Calit2 Continues Support for Hands-On Engineering Projects for Undergraduates
By Maureen C. Curran
|
San Diego, CA, April 20, 2007 -- Continuing its strong tradition of supporting undergraduate student research and education, the UCSD division of Calit2 sponsored nearly a dozen students working on four engineering design course projects in two departments of the UCSD Jacobs School of Engineering during the winter quarter.
Calit2 sponsored two of the seven total design projects in the Electrical and Computer Engineering (ECE) department's team project-based course (ECE 191), as well as an independent project which stemmed from an earlier ECE191 project. A project for the Mechanical and Aerospace Engineering (MAE) department design course (MAE 156) was also supported.
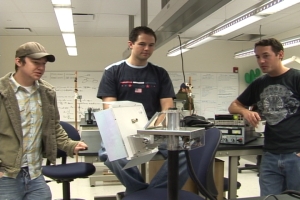
Cory Spivey, Scott Wasowski, Robert Ruzich and Andrew Goorchenko designed, fabricated and assembled a "Pan Tilt Antenna Controller" for MAE156. The antenna controller can remotely rotate and tilt (simultaneously and separately) a unidirectional antenna mounted atop Calit2's Antenna Caddy (a 35 foot antenna mast which is easily stored and quickly set up). The antenna controller is lightweight, durable, weather proof and operational in high winds.
"It was an amazing class, an amazing project," says an enthusiastic Cory Spivey, "because, not only did we get to combine the technical and theoretical knowledge from our undergraduate work here, we got to incorporate an industry partner and solve a real world problem." The rest of the team agrees.
|
Project mentor Daniel Johnson, a Calit2 staff researcher, who sponsored the team with Calit2 principal development engineer Don Kimball, was pleased. "I like how it turned out," he says, "We now realize that the controller can be applied to many other things, such as Gizmo."
The Antenna Caddy supports CalMesh, a deployable ad-hoc mesh network developed at Calit2, which is used to create a wireless communication "bubble." Previously, the directional antennas on top of a deployed Antenna Caddy had to be positioned manually prior to setup. The pan, tilt antenna controller enables remote fine tuning of signal strength and the ability to accommodate movement of other nodes in the mesh.
The project to build the Antenna Caddy itself was an MAE156 course project just last year, in which Johnson was a team member, as an MAE senior. "I saw the bonding that took place," notes Johnson, "They started the project as classmates and have ended as friends; that's what happened with my team. To have them looking to me for answers was a bit of a role reversal, but it was very rewarding."
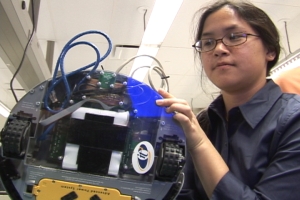
"Where's My Roomba?" was an ECE191 project mentored by Calit2's Kimball and Javier Rodriguez Molina, a staff researcher and ECE graduate student. It is related to Calit2's Gizmo Truck project, a WiFi signal recorder for outdoor deployment which uses GPS to determine position. GPS does not work indoors (cannot access a satellite backhaul). So, Nichole Nguyen, Leonel Romero and Steven Bowers developed an indoor position locator system for Roomba, which is an off-the-shelf disk-like vacuum cleaner that travels around a room cleaning on its own.
Given a point of origin, the Roomba-based device can map its location inside a building, all the while measuring the WiFi signal strength of available local networks. All information is sent to a laptop for display in a graphical user interface.
"This was a really cool project," says Nichole Nguyen, "I really liked it when we began to get the bumper to work they way we wanted." Speaking for the team she continues: "Our mentors were great, really understanding and they helped us a lot."
|

Like the antenna controller, Gizmo and the Roomba position locator device - called "MOP" for Mobile Operations Platform - were designed to support the deployment of CalMesh, which was developed for use in environments where the communications infrastructure is damaged or nonexistent, such as disasters and wide-scale emergencies.
Brandon Tikalsky, Ashkan Arianpour and Crosby Yung worked on the "Telemedicine and Wound Care" project, creating a prototype imaging system that could be used in a clinical setting. They designed, tested and implemented a system to unobtrusively capture images of wounds which enables calibrated length and area measurements with very little error.
It is difficult for some patients to travel to the hospital or clinic for follow-up wound care, such as those in managed care situations (nursing homes) and those who live in rural and other underserved areas. The intention of the prototype is to provide accurate information to the clinician in order to answer the question: Does the patient have to come in?
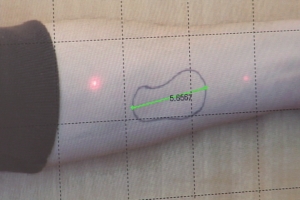
Using parallel lasers (made from laser pointers) aligned with a high resolution digital camera, the team created a projected ruler that does not have to be placed on the patient for accurate measurements to be taken. "We use the laser spots on either side of the wound to set the scale," explains Brandon Tikalsky, "and get the correct length measurement. Then in MATLAB, we can determine circumference and area measurements."
"With some minor changes, this prototype can be used in an initial pilot effort that we are engaged in with plastic surgeon Marek Dobke of the School of Medicine and others," notes Bill Hodgkiss, an associate director of the UCSD division of Calit2, who mentored the ECE191 project. Hodgkiss is also a professor at the Scripps Institution of Oceanography (Scripps) and an adjunct professor in ECE. Scripps co-sponsored the ECE191 course project with Calit2.
"The pilot will look into the feasibility of telemedicine applications for wound care, remote health care diagnosis and health care delivery," continues Hodgkiss. "We want to find out how effective and useful this use of imaging can be." During the pilot, the prototype will be put into a clinic where the physician can both directly examine the patient and use the imaging system. They are also interested in determining if it is a useful means for doing consultation among multiple physicians, as opposed to each having to examine the patient directly.
|
Many of the engineering design projects are open-ended and build on the previous teams' efforts. The work of the Wound Care project will be picked up by new students in the spring quarter ECE191 course. Work on the Pan Tilt Antenna Controller will continue with three of the original MAE156 students as an independent design course (MAE171). MOP (Roomba indoor locator) will be extended in future design courses.
As an ECE190 independent design course, Joseph Kurniawan worked on a new aspect of his team ECE191 project from the fall. Calit2 researcher Rajesh Hegde again served as mentor for the project - "A Platform for Situation Aware Ubiquitous Computing." In the fall, Kurniawan and his ECE191 teammates worked on the code for the environmental audio recognition aspect of an enhanced situational awareness system. Winter quarter's work focused on creating an interface for the system and thus provide a platform for various applications and/or data acquisition software that may be used with it in future deployments. He enjoyed both quarters, working as a team then working independently. Just graduated, he will be working for Calit2 to take the platform to completion.
ECE191, Engineering Group Design Project, is an upper division course which is part of the design requirement for electrical and computer engineering majors and is typically taken by seniors. Projects are funded and/or mentored by campus organizations such as Calit2 and Scripps, government organizations such as SPAWAR and industry sponsors (participating this quarter: Raytheon, ARINC and Packetvideo). The instructors were ECE professors Pankaj K. Das and Charles Tu, who is also associate dean of the Jacobs School.
MAE156, Fundamental Principles of Mechanical Design, is the capstone sequence for the department. It is a senior level class in mechanical engineering, in which students apply engineering principles to the design and fabrication of working machines. The second quarter in which Calit2 participates as a sponsor is MAE156B, Sponsored Design Projects. The instructors were MAE professors Jerry Tustaniwskyj and Nate Delson.
Related Links
Pan Tilt Antenna Controller
Antenna Caddy
Gizmo Project Page
Electrical and Computer Engineering 191
Mechanical and Aerospace Engineering 156