

'Cutting'-edge Research to Develop a Better View for Surgeons
By Maureen C. Curran
|
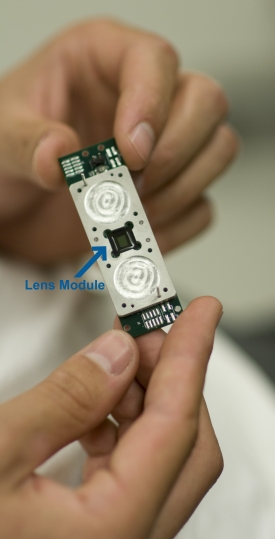
San Diego, CA, Dec. 22, 2008 — A multidisciplinary team of researchers at the UC San Diego division of the California Institute for Telecommunications and Information Technology (Calit2) is nearing completion of their first prototype of "SurgiCam," a tiny surgical camera that can be inserted through a 1.5 cm incision in the abdomen during minimally invasive surgery (MIS).
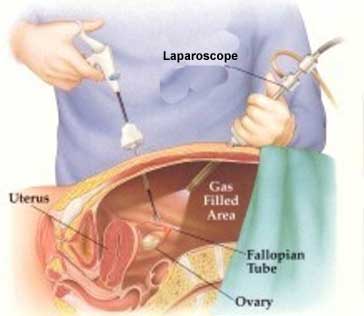
During an MIS procedure, such as laparoscopy, multiple small incisions are made in the abdominal wall for various devices (light, camera, surgical instruments), the most important of which is the camera, the "eyes" of the surgeon. With its positive impact on the patient's surgical outcome, comfort and recovery, MIS has become the method of choice for an increasing number of surgical procedures.
However, its practice is made difficult by relatively large laparoscopic cameras which have limited imaging capability and require cumbersome cables that interfere with the surgeon's movements. To solve this and other problems, faculty, staff and student researchers -- engineers and computer scientists from Calit2 and the Jacobs School of Engineering and surgeons from the UCSD School of Medicine (SOM) -- are collaborating on Calit2's SurgiCam project to develop a compact, high-performance and wireless surgical imaging system for MIS.
"This is a successful collaboration between engineers and surgeons," said Mark Talamini, chair and professor of the SOM's Department of Surgery. "It combines rare local talent in micro-imaging, minimally invasive surgery, computer tech, and radio transmission of images."
|
SurgiCam will provide improved visual information and detail, while occupying less space and eliminating the bulky cable that connects today's cameras with operating room video displays. It will offer multiple features and functionality which have not been achieved with any laparoscopic or endoscopic camera previously. The tiny device and system will ultimately enable high-resolution imaging, auto-focus, optical zoom, sophisticated image processing, wireless transmission of video images and other features. The next generation will also offer stereoscopic 3-D vision similar to what is used currently in robotic surgery.
"I would say that the most important feature of this camera is its optical zooming capability - as opposed to digital zooming, as some digital cameras have," says Boz Kamyabi, a Calit2 senior development engineer, "This feature allows the camera to be out of the way of the surgeons, but they will still have a close up view of where they want to operate."
These innovations will utilize recent breakthroughs in three areas: in bio-inspired fluidic lenses, invented in the laboratory of Yu-Hwa Lo, in real-time video processing algorithms developed by Truong Nguyen and colleagues, and in a novel control mechanism designed by Calit2 engineers. Lo and Nguyen are professors in the Electrical and Computer Engineering (ECE) department; Calit2's engineers on the SurgiCam project are led by Don Kimball, a principal development engineer.
"The problem with microfluidic lenses in the past is they have required macro-hydraulic control systems for focus and zoom. In fact, you needed a high-voltage large-area electro-hydrodynamic control system that was more suitable for my father's fire-pump motor controls," explained Calit2's Kimball. "You need to control the little lens with an equally tiny mechanism. My Calit2 colleagues Doug Palmer and Daniel Johnson have finally come up with a way to control the lenses so that they can be scaled down in size to something comparable to the lenses themselves."
|
"The SurgiCam project is a great example of cooperation between researchers from diverse fields," noted Calit2 division director Ramesh Rao, "The issues could not be solved without the expertise of everyone involved. I have high hopes for a productive outcome."
As the SOM's newly-arrived chief of surgery in late 2005, Talamini approached Calit2 UC San Diego's director, Ramesh Rao, about the problems with current surgical camera systems. Rao asked Calit2's Manager for Strategic Partnerships, Laura Wolszon, to help put together the technical team and shepherd the project during its evolution. SurgiCam has now been in development for over 2 years.
"SurgiCam will enable natural orifice surgery," remarked surgeon Talamini, referring to a groundbreaking new MIS technique introduced in 2004, called Natural Orifice Transendolumenal Endoscopic Surgery (NOTES). NOTES eliminates the need for abdominal incisions altogether by using natural openings in the body (mouth, vagina or rectum) to access the abdominal cavity. It uses a flexible, tube-like port to allow a camera, light source and surgical instruments to enter the body, without incisions, through a single point of access, further minimizing trauma to the body wall. Its camera system suffers from many disadvantages, however. Most significant is that movements of any instrument in the tube also moves the camera, resulting in an unstable image which can even change its orientation. The surgeon can be looking at the right-side-up view one minute, then sideways or upside-down views in the next. In addition, its camera has no optical zoom or auto-focus capability, and requires a heavy cable to connect it to the video screen.
The researchers on SurgiCam include Lo and Nguyen from ECE; Yoav Freund, a professor in Computer Science and Engineering and an expert in automated image analysis; Don Kimball and Doug Palmer, principal development engineers at Calit2; Boz Kamyabi, Cuong Vu and Daniel Johnson, staff engineers at Calit2; and the Dept. of Surgery's Mark Talamini, Santiago Horgan and Yoav Mintz (now at Hadassah University Hospital in Jerusalem). Students contributing to the project are Jack Tzeng, Frank Tsai and Sung Hwan Cho (from ECE); Daniel Johnson (grad student in the Mechanical and Aerospace Engineering department as well as a Calit2 staff engineer); and Cameron Francis (medical student).
The SurgiCam project has been funded by Calit2 UCSD since the beginning, with additional seed funding in the early months from UCSD's von Liebig Center. The Jacobs School of Engineering faculty have contributed their own and their students' time; a two-year grant for partial student support was obtained through the UCSD Chancellor's Interdisciplinary Collaboratory program. Most recently, a $200,000 grant from the U.S. Army's Telemedicine and Advanced Technology Research Center (TATRC) was awarded to Lo and Talamini, to help take the prototype to the next stage. Additional federal funding is being sought.
So far, six SurgiCam-related invention disclosures have been submitted to the UC San Diego Technology Transfer Office and several patent applications have been filed. The research team continues to entertain opportunities for joint development with industry so SurgiCam can be commercialized and thereby benefit the public.
|
For additional information, contact Laura Wolszon, Calit2's manager for strategic partnerships, at Lwolszon@ucsd.edu or 858-534-7017.